This article is the third in the multi-part series “Building the KR01 Robot” ( 1 | 2 | 3 | 4 ), and describes beginning to design and build the hardware of the KR01 robot project.
With the robot chassis largely complete (at least for now) I began to plan out where I’d mount the Raspberry Pi, motor controller and other PC boards.

Historically, robots seem to generally have mounted their drive systems on the bottom of a horizontal platform, with their control systems on the top. You can even seen this on Shakey, the first autonomous robot, which was developed back in the late 1960s at Stanford Research Institute (SRI).
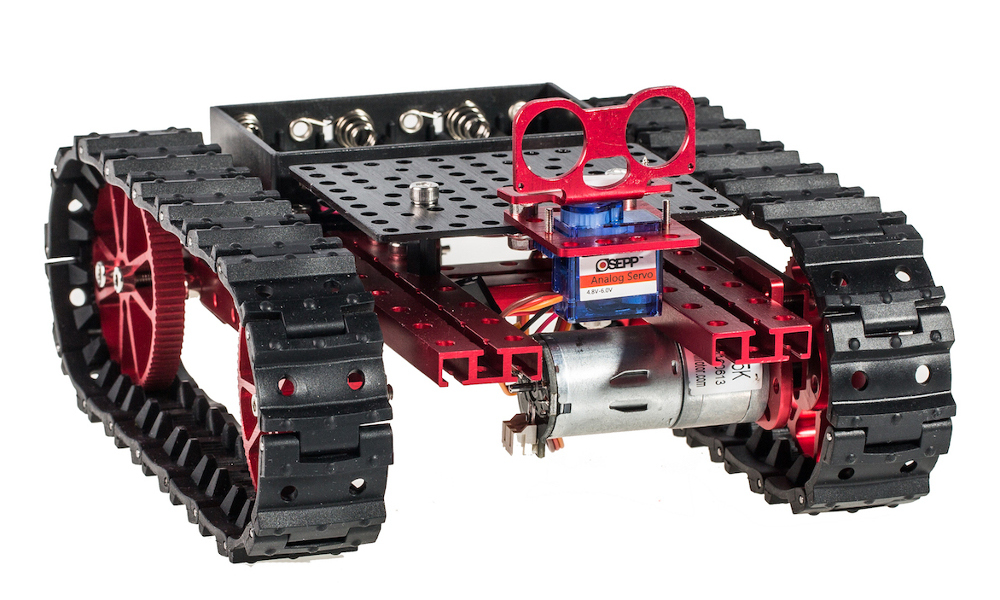
My modified OSEPP Tank Kit provided a horizontal area to mount parts but I’d have to drill into the aluminum1 and that seemed rather inflexible, and the mounting holes of the various components didn’t match that of the OSEPP beams, which use a 16mm grid.
I wanted to mount my components on something lightweight and non-conductive, cheap, and easy to modify and/or replace. Some kind of plastic seemed right. I could have used used acrylic (called “perspex” here in New Zealand) but it tends to be rather brittle and easy to crack or split, so I settled on Delrin (a trade name for polyoxymethylene plastic), which is a bit softer, tougher, and almost indestructible. Delrin is often used for making bearings.
The Lower Bits
One thing I learned long ago: it’s all very well to be able to build something but you also need to be able to disassemble it easily. I figured that I needed some way to gather the various wires from the motors and motor encoders in such as way that I could use detachable cables to easily remove the top platform from the chassis. So one principle I’m using on the KR01 is to try to use jumper wires and single and dual header pins for the connections, so that things don’t have to be permanently soldered together.

For what I decided to call the Chassis Interface Board I planned to use two 6 pin IDC cables for the connections to the upper part of the robot and one of the AdaFruit Perma-Proto boards to hold all the parts and organise the wiring, which just happened to fit into the area available. I mapped out the pin layout and then soldered some header pins to the board. I also cut a bit of 10mm aluminum “L” section to hold the SPST power switch, the DPDT motor kill switch, and a status LED (you can see this in the photo below).

I ended up drilling two small holes (the horror!) in the aluminum rails to hold some nylon standoffs, then mounted the Chassis Interface Board and wired things up.
Even with all my planning I didn’t get it right the first time and had made a wiring mistake. Apart from the mistake, now that I’m done with these components, the nice thing is that because I’ve not soldered everything together (except in creating the components themselves) I can take it all apart when I decide to make a design change. And that’s bound to happen.
The Platform
I decided to mount my components onto a black Delrin platform using nylon standoffs, so I bought an assortment of 2.5mm black nylon standoffs from Adafruit — there’d be no issue with short circuits. A robot used for off-road or robot combat might need to use metal for strength, but the KR01 is strictly a domesticated house robot2
The closest plastics store in Petone didn’t carry sheet Delrin but Macplas up in Auckland did. After a brief phone conversation about which plastics were most appropriate for a small robot, I ordered some black 3mm Delrin for the platform and some clear 3mm polycarbonate for the front bumper. I find that when you involve people in the details of what you’re doing they can use their expertise to best help you.

Rather than start with the Delrin (which is kinda expensive) I prototyped the board first using a milky white nylon chopping board I bought at the Warehouse for $5. Yes, it occurred to me that I could have just used the nylon but the Delrin is thinner and much cooler. I mean, who makes a robot out of a chopping board?
I taped some paper to the plastic and laid out the various components, then drilled the holes. They say “measure twice, cut once” but I still made a mistake. So maybe it should be “measure thrice, cut once”, 3