

This article is the second in the multi-part series “Building the KR01 Robot” ( 1 | 2 | 3 | 4 ), and describes beginning to design and build the hardware of the KR01 robot project.
Inspired by David Anderson’s SR04 robot (in particular, his YouTube video) I searched around for a suitable robot platform, the kind of chassis and motor that fit the scale of the design-in-my-head, and a few other factors. Having read David’s documentation of the project I rather liked his “very loose” design criteria:
- Survive in a wide range of (cluttered) human environments autonomously and continuously, without getting stuck.
- Provide a robust and reliable platform for developing navigation and behavior software.
- Be entertaining and aesthetic for the local human population.
I thought I’d have a go at updating what he’d done in 1998 to see what 22 years might have brought to progress in the world of “personal robots”. I’d been perusing the AdaFruit and Pimoroni websites and had seen all manner of pretty amazing sensors for prices I could afford. It was time to stop making Raspberry Pi night lights and try something more ambitious.
I admit to having strayed from one of David’s stronger design principles in the SR04, that being his “dual-differential drive platform with the geometry of an 11 inch circle” 1. That symmetry is valuable and I’m hoping that my tank-tread design (or four wheels if the treads don’t work out so well) won’t suffer. Watching the SR04 rotate continuously on a table without moving in place is pretty impressive. But I have to start somewhere. I can always modify the design…
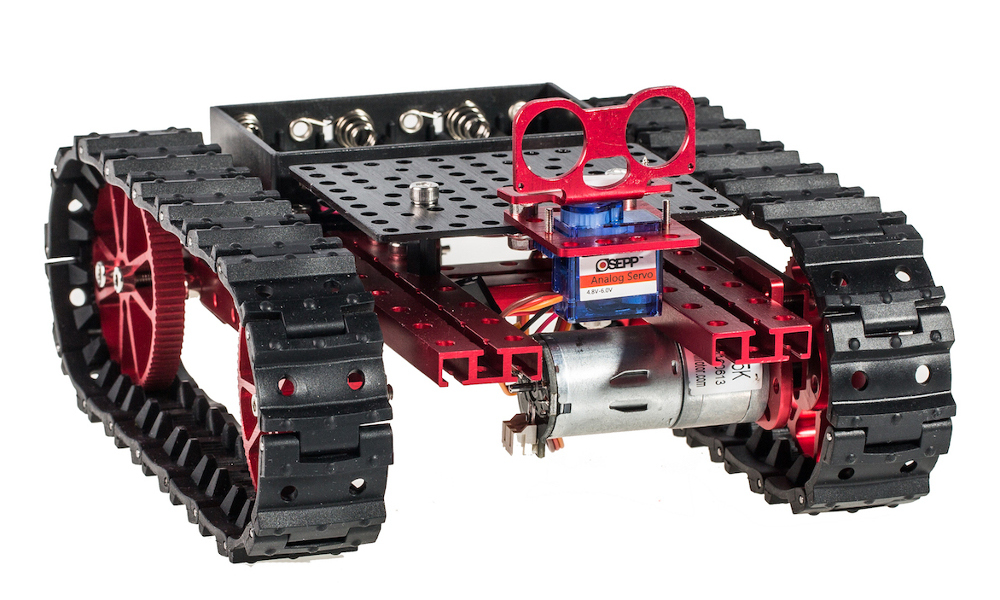
So, I settled on an OSEPP Tank Kit. It’s a bit like Lego or Meccano in that the kit is provided as a set of red-anodised aluminum beams, some accessory plates and connector bits, using 4mm nuts and bolts to hold things together. There’s some flexibility in this, and OSEPP sells accessory kits. I bought an extra set of beams, as I knew of one deficiency in the Tank Kit I wanted to immediately change: it has four wheels but only two motors: the port motor at the front, the starboard motor at the rear.
Since David’s design uses a PID Controller I knew I’d need to use motor encoders, which was one of the reasons I chose the OSEPP kit: they offer a pair of motor encoders using Hall Effect sensors. I’d seen an image of two OSEPP motors and encoders mounted along a single beam, quite an elegant design. It seemed prudent to have both of the encoders on the same pair of motors (either the front or the rear). The Tank would have to be wider and I also wanted four drive motors, not just two. Using tank treads is not very efficient so I figured there’d be insufficient horsepower to drive a robot with only two.
In New Zealand orders from overseas can take anywhere from a few days to weeks in waiting, so I started making decisions and putting in orders. Locally I bought some stainless 4mm hardware from Mitre 10 and Coastal Fasteners. (See Vendors on the NZPRG wiki.)
The Kit Arrives
I’m not going to do one of those ridiculous unboxing videos. Yes, the box arrived. I opened it. I didn’t keep track much with videos or photos. I was playing, not performing.

The OSEPP kit is well-designed, though it’s impossible not to leave a bit of rash on the red anodisation. If you simply built the Tank Kit as intended this wouldn’t be an issue so much, but I tried at least four or five different permutations before settling on one design, and then had to modify it several times when I tried adding things like the front bumper supports and the mount for the power switches.

The hardware is fun to work with. Not like Lego, where it can be a struggle to connect things securely, the OSEPP kit’s parts are held together by 4mm stainless steel nuts and bolts.
I locally sourced some stainless lock nuts (also called “nyloc nuts”) as I prefer them to the serrated flange nuts provided with the kit (though these work just fine too).
The Motor Encoder kit hadn’t arrived so I built it without remembering that photo I’d seen with the single beam holding both two motors and their encoders. The design as shown above on the kitchen table had no place to mount the encoders. The photo below shows each pair of motors mounted to a single beam, with the motor encoders attached to the front (top) pair.

When the motor encoders finally arrived I did another round of building and came up with what I thought was the final chassis, but even that had to change once I tried to mount the tank treads. As you can see, there’s not much clearance between the front bumper and the treads. And of course, the front bumper was only a stand-in until I could begin building the real bumper.
Next time: we begin the wiring and mounting the platform for the circuitry…